|
M. Murat Topaç, N. Sefa Kuralay
Dokuz Eylül Üniv. Müh. Fak., Makine Müh. Böl., Otomotiv A.B.D.
Bornova, İzmir
Not: Bu makale ilk olarak TMMOB Mühendis ve Makina Dergisi Temmuz 2009 sayısında yayınlanmıştır ve aşağıdaki linkten PDF formatında indirilebilir;
www.mmo.org.tr/resimler/ekler/5dfa0f45e8707dd_ek.pdf (11,7MB)
Özet
Ağır taşıtlarda, gövdenin yalpa eğilimini sınırlandırmak amacıyla, süspansiyon sisteminde kullanılması gereken stabilizatörün çapını belirlemede uygulanabilecek pratik bir yöntem açıklanmıştır. Bunun için tasarım aşamasındaki 17 ton kapasiteli bir yolcu otobüsünün bilinen teknik değerleri ışığında önce, eşdeğer burulma yayı yaklaşımı kullanılarak basit yalpa analizi yapılmıştır. Elde edilen yalpa açısı değerleri, taşıtın tam ölçekteki basitleştirilmiş simülasyon modelinden bulunan sonuçlarla karşılaştırılmış, aks ve taşıt gövdelerini bağlayan çubuk elemanların dinamiğinin yalpa eğilimine etkisi değerlendirilmiştir. Bu sonuçlar ışığında, gövde yalpasını literatürde önerilen sınırlama dahilinde tutabilmek için taşıtın ön aksına yerleştirilmesi gereken stabilizatörün burulma yay katsayısı ve bu katsayıyı sağlayan çap değeri belirlenmiştir. Parçanın tam ölçekte katı modeli oluşturulmuş, taşıtın kritik viraj dönüşü durumunda, stabilizatör bacaklarında oluşacak elastik şekil değişimi sonlu elemanlar analizi kullanılarak simüle edilmiştir. Stabilizatör bünyesinde oluşan en yüksek gerilme değerleri ışığında parçanın öngörülen fonksiyon açısından uygunluğu değerlendirilmiştir.
Anahtar kelimeler: Taşıt gövdesi dinamiği, yalpa, stabilizatör, mekanik tasarım
Computer aided design of an anti-roll bar for a passenger bus
Abstract
A practical method to determine the diameter of the anti-roll bars used to limit the body's tendency to roll of heavy commercial vehicles is described. In order to do this, a roll analysis was performed by using equivalent roll stiffness approach in the light of the prior known technical data of a 17 tonnes capacity passenger bus. Roll angle values obtained were compared to the results achieved from a simplified full-scaled simulation model of the vehicle which was created to evaluate effects of the dynamics of arms mounting the axle and vehicle body on body roll tendency. In the light of these results, to be able to limit the body roll angle in the recommended limits given in literature, the torsion spring coefficient and diameter of the anti-roll bar which should be placed on the front axle were determined. A full-scaled solid model of the anti-roll bar was composed. The elastic deformation of the anti-roll bar legs during the critical cornering maneuver of the vehicle was simulated by using finite element analysis. In the light of the maximum stress obtained from the analysis, functional conveniency of the anti-roll bar was evaluated.
Keywords: Vehicle body dynamics, body roll, anti-roll bar, mechanical design
1. GİRİŞ
Bir taşıt gövdesi için uzayda altı temel serbestlik derecesi tanımlanır (Şekil 1). Bunlardan üçü öteleme, diğerleri ise dönme hareketlerine izin verir. Gövdenin, kütle merkezine sabit X, Y ve Z eksenleri çevresindeki sonlu dönme hareketleri sırasıyla yalpa, baş sallama ve savrulma olarak adlandırılır [1,2].
Şekil 1. Taşıt gövdesinin uzaydaki serbestlikleri
Bir karayolu taşıtının stabil bir sürüş karakteristiğine sahip olabilmesi için anılan bu üç hareket belirli sınırlar dahilinde tutulmalıdır. Diğer taraftan, yolcu taşıtlarının süspansiyon sistemlerinde kullanılan yayların, kontrolün yanısıra konfor gereksinimini de karşılaması beklenir. Ancak konforun ön planda tutulduğu bir süspansiyon sistemi taşıtın viraj hareketi sırasında, öngörülen sınırların daha üzerinde yalpa açısı oluşmasına neden olabilir. Böyle bir durumda gövdenin yaylara ilaveten, stabilizatör olarak adlandırılan dengeleme çubukları yardımıyla desteklenmesi gerekir. Stabilizatör, yapısı ve monte ediliş biçimi gereği yalnızca burulmaya çalışmakta, taşıt şasisinin düşey titreşim frekansına pratik bir etkide bulunmamaktadır (Şekil 2).
Bu çalışmada, sabit akslı taşıtlarda kullanılan yayların yay katsayısına göre kullanılması gerekli stabilizatörün burulma yay katsayısının ve çapının belirlenmesinde izlenebilecek pratik bir yol kısaca açıklanmıştır. Bunun için tasarım aşamasındaki 17 ton kapasiteli bir yolcu otobüsünün teknik verileri esas alınmış, viraj hareketi sırasında taşıt konstrüksiyonunda kullanılan yayların, gövdenin yalpa eğilimine karşı gelme yeteneği, eşdeğer burulma yayı yaklaşımı kullanılarak incelenmiştir. Oluşturulan matematik modelden hareketle gövde yalpasını, literatürde öngörülmüş sınırlar içerisinde tutmak amacıyla taşıtın ön aks konstrüksiyonuna eklenmesi düşünülen stabilizatörün eşdeğer burulma yay katsayısı belirlenmiştir. Viraj hareketi sırasında ön ve arka aks yalpa merkezlerindeki dinamik konum değişiminin, matematik modelden elde edilen yalpa açısı değerlerine oranla hangi ölçüde farklılığa neden olduğunu saptamak amacıyla, SolidWorks® ve COSMOSMotion® paket programları yardımıyla taşıtın tam ölçekli basitleştitilmiş bir simülasyon modeli oluşturulmuştur. Viraj hareketi, değişik yanal ivme değerleri için simüle edilmiş, buradan elde edilen yalpa açısı değerleri, kurulan matematik modelden hesaplanan açılarla karşılaştırılmıştır.
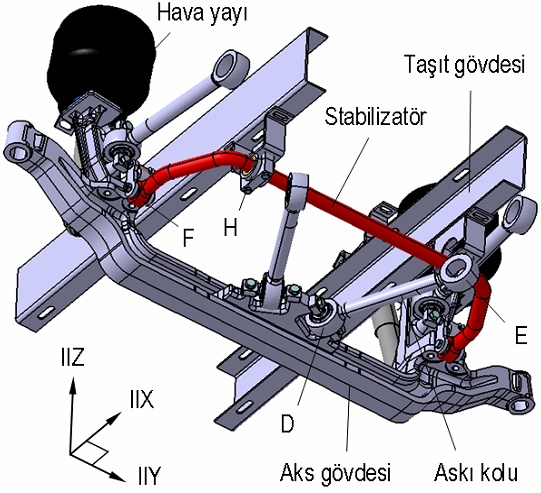
Şekil 2. Taşıt ön aksında stabilizatörün yerleşimi
Son bölümde, hesaplanan yay katsayısını sağlayacak stabilizatör çapı belirlenmiştir. Taşıtın savrulma sınırlarında gerçekleştirilecek bir viraj dönüşü sırasında, stabilizatör bacaklarında oluşacak elastik şekil değişimi dikkate alınarak, söz konusu çapın mukavemet açısından yeterliliği ANSYS® Workbench V11.0 sonlu elemanlar paketi kullanılarak analiz edilmiştir. Bu şekilde, kritik viraj dönüşü durumunda parça bünyesinde oluşacak gerilme değerleri hesaplanmış, parçanın fonksiyona uygunluğu değerlendirilmiştir.
2. Taşıtın yalpa davranışının incelemesi
2.1. Taşıt Gövdesinin Yalpa Hareketi
Belirli bir aq yanal ivmesiyle gerçekleştirilen viraj hareketi sırasında taşıt gövdesinin, FC santrüj kuvveti nedeniyle düşey eksenden  yalpa açısı kadar saparak viraj dışına doğru yatması "yalpa hareketi" olarak adlandırılır (Şekil 3). Bu sırada gövdeye etkiyen devirme kuvveti, aks ile gövde arasına monte edilmiş yay elemanlarının oluşturduğu toplam direnç momenti tarafından karşılanır. Konfor ve kontrol nedenleriyle yalpanın belirli sınırlar dahilinde tutulması gerekir. Zira aşırı derecedeki bir yalpa hareketi, özellikle kütle merkezi yüksekte bulunan ağır taşıtlarda viraj emniyetini olumsuz etkilemektedir. Modern binek taşıtlarında aq=1(m/s^2)'lik yanal ivme için gövdenin ortalama yalpa açısı kadar saparak viraj dışına doğru yatması "yalpa hareketi" olarak adlandırılır (Şekil 3). Bu sırada gövdeye etkiyen devirme kuvveti, aks ile gövde arasına monte edilmiş yay elemanlarının oluşturduğu toplam direnç momenti tarafından karşılanır. Konfor ve kontrol nedenleriyle yalpanın belirli sınırlar dahilinde tutulması gerekir. Zira aşırı derecedeki bir yalpa hareketi, özellikle kütle merkezi yüksekte bulunan ağır taşıtlarda viraj emniyetini olumsuz etkilemektedir. Modern binek taşıtlarında aq=1(m/s^2)'lik yanal ivme için gövdenin ortalama  0,6(°) yalpa yapması normal kabul edilmektedir [3]. 0,6(°) yalpa yapması normal kabul edilmektedir [3].
Tablo 1. Model taşıtın bazı teknik değerleri
Büyüklük |
Kısaltma |
Değer |
Birim |
Taşıtın toplam yaylandırılmış kütlesi |
m2F |
14788 |
kg |
Aks mesafesi |
LF |
6050 |
mm |
Kütle merkezinin ön aksa uzaklığı |
LV |
3957 |
mm |
Kütle merkezinin yerden yüksekliği |
hSP |
1196 |
mm |
Ön aks iz genişliği |
sRV |
2096 |
mm |
Arka aks iz genişliği |
sRH |
1825 |
mm |
Şekil 3. Taşıt gövdesinin yalpa hareketi
İncelenen taşıtta gövdenin yaylandırılması, dört noktadan askılı sabit akslar üzerine monte edilmiş hava yayları yardımıyla gerçekleştirilmektedir. Gövde ön aksta iki, arka aksta toplam dört adet yay tarafından taşınmaktadır. Arka aks konstrüksiyonunda kullanılan hava yaylarının temel boyutları ve yay karakteristiği örnek olarak Şekil 4'te verilmiştir. Taşıt gövdesinin düşey dinamiği ve yalpa eğilimi, bu diyagramda görülen, adyabatik progresif eğri takımı üzerinden değerlendirilmektedir. Yüklemenin bir fonksiyonu olan hava yayı katsayısı, yay üzerine etkiyen yükün diyagramın ordinatına taşınması ile bulunan noktadan geçen adyabatik eğriye çizilen teğetin eğimidir [1,3,5]. Hava yayı karakteristikleri genellikle efektif basınç, pe cinsinden ifade edildiğinden, yay katsayısı hesaplamasında açık hava basıncı pa'nın etkisi de dikkate alınır. Yay katsayıları bu yaklaşıma göre taşıtın tekerlek temas noktalarına etkiyen düşey yükler üzerinden, Şekil 5'e uygun olarak hesaplanmıştır. Dolayısıyla bulunan değerler yayların montaj noktasındaki gerçek katsayıları (cF) değil, tekerleğin yere oturduğu noktanın normali doğrultusunda yerleştirildiği varsayılan model yayların katsayısıdır (cFR). Ön ve arka aksa isabet eden yaylandırılmış kütleler ve yay karakteristikleri üzerinden ön aks için, cFRV=125,3(kN/m) ve arka aks için, cFRV=109,24(kN/m) olarak hesaplanmıştır.
Şekil 4. Arka aks yayının temel boyutları ve karakteristikleri
2.2. Eşdeğer burulma yayı modeli
Taşıtın yalpa hareketi matematiksel olarak modellenirken kullanılan yaklaşımlardan bir tanesi, gövdenin "yalpa ekseni" olarak adlandırılan bir eksen etrafında döndüğü varsayımıdır. Yalpa ekseni, ön ve arka aks yalpa merkezlerini (MPV ve MPH) birleştirdiği düşünülen teorik bir doğrudur [6,7]. Yolcu otobüsünün, bu düşünceden yola çıkılarak oluşturulmuş matematiksel yalpa modeli Şekil 6'da görülmektedir. "Eşdeğer burulma yaylı yalpa modeli" olarak da bilinen bu sistemde yalpa ekseninin, yalpa merkezlerinde bulunan, katsayıları cDV ve cDH olan K ve L burulma yaylarına, X' ekseni etrafında dönebilecek şekilde yataklandığı varsayılmaktadır. K ve L, tekerlek temas noktası için katsayıları hesaplanmış teorik yaylar yerine yalpa merkezlerine yerleştirildiği düşünülen ve bunlara eşdeğer burulma rijitliği oluşturabilen model yaylardır.
Şekil 5. Karakteristik eğri olmaksızın belirli bir yükleme değerindeki
yay katsayısının bulunması [1]
Şekil 6. Eşdeğer burulma yaylı yalpa modeli
Viraj hareketi sırasında taşıt gövdesine etkiyen yanal atalet kuvveti, burulma yayları tarafından karşılanmakta, dolayısıyla Şekil 6'da görülen durumda model üzerine etkiyen kuvvetler dengede bulunmaktadır [3]. Model burulma yaylarının katsayıları cD, tekerlek temas noktası için bulunan cFR katsayıları ve Şekil 7 yardımıyla hesaplanmıştır.
Şekil 7. Ön aksta eşdeğer burulma yayı katsayısının hesaplanması
Burada cFRV katsayısına sahip bir yayda zRV şekil değişimi oluşturacak FFRV kuvveti, 10°'den küçük açı değerleri için sin=tan (rad) ve cos1 kabul edilerek;
 (1) (1)
ve burulma yayının ön aksta taşıdığı toplam moment MFV, X ekseni çevresinde moment dengesinden her iki tekerlek için;
 (2) (2)
şeklinde yazılabilir. Bunun yanında;
 (3) (3)
olduğundan eşdeğer burulma yayı katsayısı, tekerlek temas noktasına indirgenmiş yay katsayıları üzerinden, ön ve arka aks için genelleştirilmiş şekilde;
 (4) (4)
olarak ifade edilir. Tablo 1'deki veriler yardımıyla ön ve arka aks için bulunan eşdeğer burulma katsayıları Tablo 2'de verilmiştir. Yanal kuvvet nedeniyle oluşacak devirici momentin belirlenmesinde kullanılan moment kolu, kütle merkezi SP ile bunun bulunduğu YZ düzleminin yalpa ekseniyle kesişim noktası M arasında kalan hX uzaklığıdır. Bu değer, yalpa ekseninin uzaydaki yerleşimine, dolayısıyla yalpa merkezlerinin konumuna bağlıdır.
Tablo 2. Matematik modelde kullanılan bazı büyüklükler
Büyüklük |
Kısaltma |
Değer |
Birim |
Tekerlek temas noktasına indirgenmiş yay katsayısı (ön aks) |
cFRV |
125,3 |
kN/m |
Tekerlek temas noktasına indirgenmiş toplam yay katsayısı (arka aks) |
cFRH |
218,5 |
kN/m |
Eşdeğer burulma yay katsayısı (ön aks) |
cDV |
275,2 |
kNm/rad |
Eşdeğer burulma yay katsayısı (arka aks) |
cDH |
363,4 |
kNm/rad |
|
